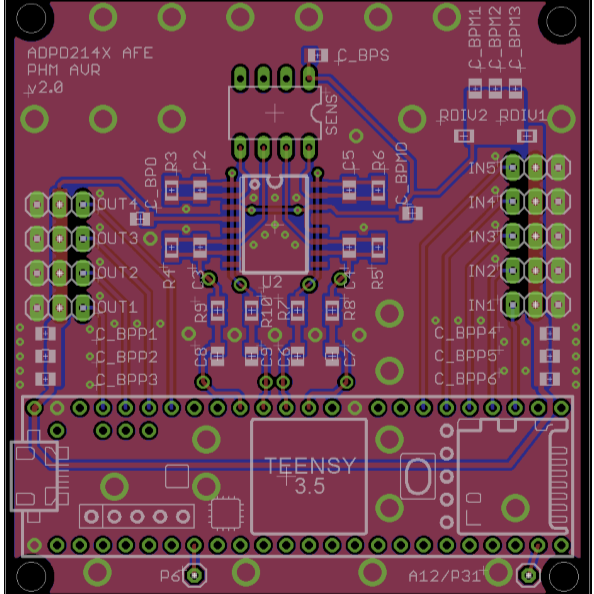
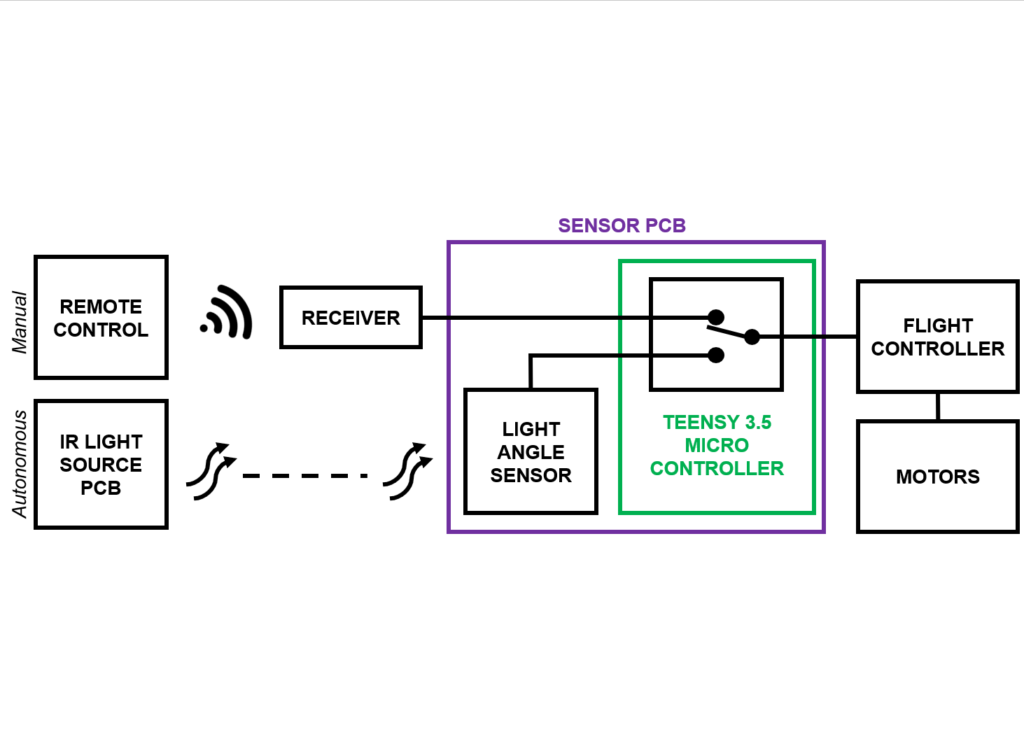
In order to incorporate the sensor with the drone’s flight controller, an infrared signal had to be recognized. Subsequently, the sensor’s output would be amplified, filtered, and analyzed to generate the appropriate commands to the drone’s flight controller to either roll, pitch, or throttle up/down. The final PWM signals were generated by an onboard Teensy3.5, which was incorporated to the PCB designed to be attached to the drone.